Nội dung chính
- I. Thực trạng và nhu cầu tự động hóa trong labo IVF
- II. Hệ thống robot Pearl 2 và ứng dụng trí tuệ nhân tạo để nhận diện noãn
- III. Thiết bị vi dòng chảy FIND-Chip giúp tìm noãn không dựa trên thị giác
- IV. Phát hiện COC bị tìm sót thủ công bằng thiết bị tự động hóa
- V. Đánh giá tính an toàn lâm sàng và kết quả trẻ sinh sống
- VI. Triển vọng tương lai của tự động hóa tìm noãn
- Tài liệu tham khảo:
Tìm và phân lập phức hợp tế bào noãn - tế bào hạt (Cumulus-Oocyte Complex - COC) từ dịch nang là bước khởi đầu mang tính quyết định trong ngày 0 (D0) trong quy trình vận hành tại các labo hỗ trợ sinh sản (HTSS). Hiện nay, quy trình tìm noãn vẫn chủ yếu được thực hiện thủ công bởi các chuyên viên phôi học dưới kính hiển vi soi nổi, phương pháp thủ công này hầu như vẫn không thay đổi trong hơn 4 thập kỷ phát triển ngành HTSS.
Tìm noãn là một công việc tốn nhiều công sức, đòi hỏi sự tập trung cao độ và kỹ năng chuyên môn cao để nhận diện COC trong hỗn hợp dịch nang phức tạp bao gồm các tế bào máu, cục máu đông và các mảnh vụn mô, vv. Sự phụ thuộc vào thao tác thủ công tồn tại những hạn chế về năng suất và độ tin cậy. Như một thực tế ngoài ý muốn, tìm noãn bằng mắt thường dưới áp lực thời gian có nguy cơ cao dẫn đến bỏ sót những COC tiềm năng, điều này trực tiếp làm giảm số lượng noãn thu hồi được.
Trong IVF, số lượng noãn thu được là một trong những yếu tố then chốt dự báo tỷ lệ trẻ sinh sống cộng dồn (Cumulative Live Birth Rate - CLBR). Đối với những bệnh nhân có dự trữ buồng trứng thấp, việc bỏ sót dù chỉ một noãn cũng có thể làm mất đi cơ hội duy nhất để có phôi chuyển. Do đó, nhu cầu về các giải pháp tự động hóa giúp chuẩn hóa quy trình, giảm thiểu sai sót do con người và tối ưu hóa việc thu hồi các COC có sẵn là một yêu cầu cấp thiết để nâng cao hiệu quả điều trị.
Hệ thống Pearl 2 là một nền tảng robot tự động tiên tiến được thiết kế để mô phỏng và chuẩn hóa các thao tác xử lý COC thay vì phụ thuộc vào kỹ năng thủ công của con người (Chavez-Badiola và cs.,, 2026).
Về mặt cấu tạo, Pearl 2 bao gồm hai robot Cartesian vận hành theo trục tọa độ vuông góc được bố trí phía trên và phía dưới một bàn trượt gia nhiệt có khả năng duy trì nhiệt độ ổn định ở 37°C (Chavez-Badiola và cs., 2026). Robot phía trên tích hợp một camera độ phân giải cao (Full-HD) cùng bàn trượt cơ học để lấy nét tự động, cho phép hệ thống quan sát các tế bào với độ chi tiết cao (Chavez-Badiola và cs., 2026). Đi kèm với đó là hai bộ vi thao tác điều khiển các pipette kết nối với bơm điện tử, cho phép thực hiện các cử động hút và nhả với độ chính xác cực cao (Chavez-Badiola và cs., 2026) (Hình 1).
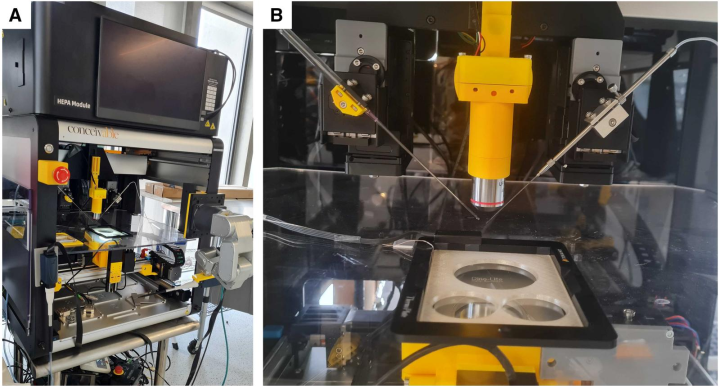
Hình 1. Hệ thống robot Pearl 2 để tìm COC và tách tế bào hạt quanh noãn. (A) Tổng quan hệ thống khép kín gồm hai robot Cartesian (phía trên và phía dưới) được bố trí cách nhau bởi một bàn trượt gia nhiệt trung tâm dùng để đặt các đĩa chứa. (B) Cận cảnh đế giữ đĩa chứa được in 3D theo yêu cầu, đặt trên bàn trượt gia nhiệt. Robot Cartesian phía trên được tích hợp một vật kính 4x (camera) và hai bộ vi thao tác Narishige để hỗ trợ quy trình tách noãn (Chavez-Badiola và cs., 2026).
Khả năng nhận diện được COC của Pearl 2 nằm ở việc ứng dụng trí tuệ nhân tạo (Artificial Intelligence - AI) và thị giác máy tính (computer vision) để tự động hóa quy trình thông qua ba bước chính: tìm kiếm COC trong dịch nang (R1), phân lập và rửa COC (R2), và tách tế bào hạt quanh noãn (R3) (Chavez-Badiola và cs., 2026).
Trong bước tìm kiếm (R1), AI điều khiển camera quét đĩa chứa dịch nang theo một mẫu định sẵn (Chavez-Badiola và cs., 2026). Thuật toán AI được huấn luyện để nhận diện các khối cumulus có khả năng chứa noãn trong dịch nang (Chavez-Badiola và cs., 2026). Sau khi xác định được vị trí COC, hệ thống sẽ tự động điều khiển kim hút di chuyển đến mục tiêu và tạo áp suất âm được tính toán chính xác dựa trên kích thước khối tế bào để hút và chuyển COC sang đĩa rửa (Chavez-Badiola và cs., 2026) (Hình 1).
Về hiệu suất, hệ thống đã thu hồi thành công 84% số lượng noãn (92/110 noãn) trong các thử nghiệm thực tế (Chavez-Badiola và cs., 2026). Các báo cáo chi tiết cho thấy tỷ lệ hiệu quả của bước tìm noãn đạt 90%, rửa noãn đạt 97% và tách noãn đạt 91% (Chavez-Badiola và cs., 2026). Quan trọng hơn, Pearl 2 đã thể hiện khả năng thực hiện độc lập không cần con người can thiệp đạt 61% cho bước tìm kiếm, 67% cho bước rửa noãn và 71% cho bước tách noãn (Chavez-Badiola và cs., 2026).
Mặc dù có những bước tiến lớn, Pearl 2 vẫn còn một số giới hạn kỹ thuật cần hoàn thiện. Tốc độ xử lý của robot hiện tại trung bình mất khoảng 76 giây cho mỗi COC, chậm hơn so với thao tác của một chuyên viên phôi học giàu kinh nghiệm (Chavez-Badiola và cs., 2026). Ngoài ra, hệ thống chưa đạt đến mức độ tự động hoàn toàn, quy trình vẫn cần sự hỗ trợ của con người trong các bước chuẩn bị ban đầu như đổ dịch nang vào đĩa và giám sát kỹ thuật số để can thiệp kịp thời trong những trường hợp dịch nang có quá nhiều tế bào khác hoặc cục máu đông lớn (Chavez-Badiola và cs., 2026). Tuy nhiên, các kết quả hiện tại là cơ sở nền móng quan trọng cho việc điều chỉnh thiết kế và lập trình AI để chuẩn hóa toàn diện quy trình tìm noãn bằng Pearl 2 (Chavez-Badiola và cs., 2026, Mutlu và cs., 2026).
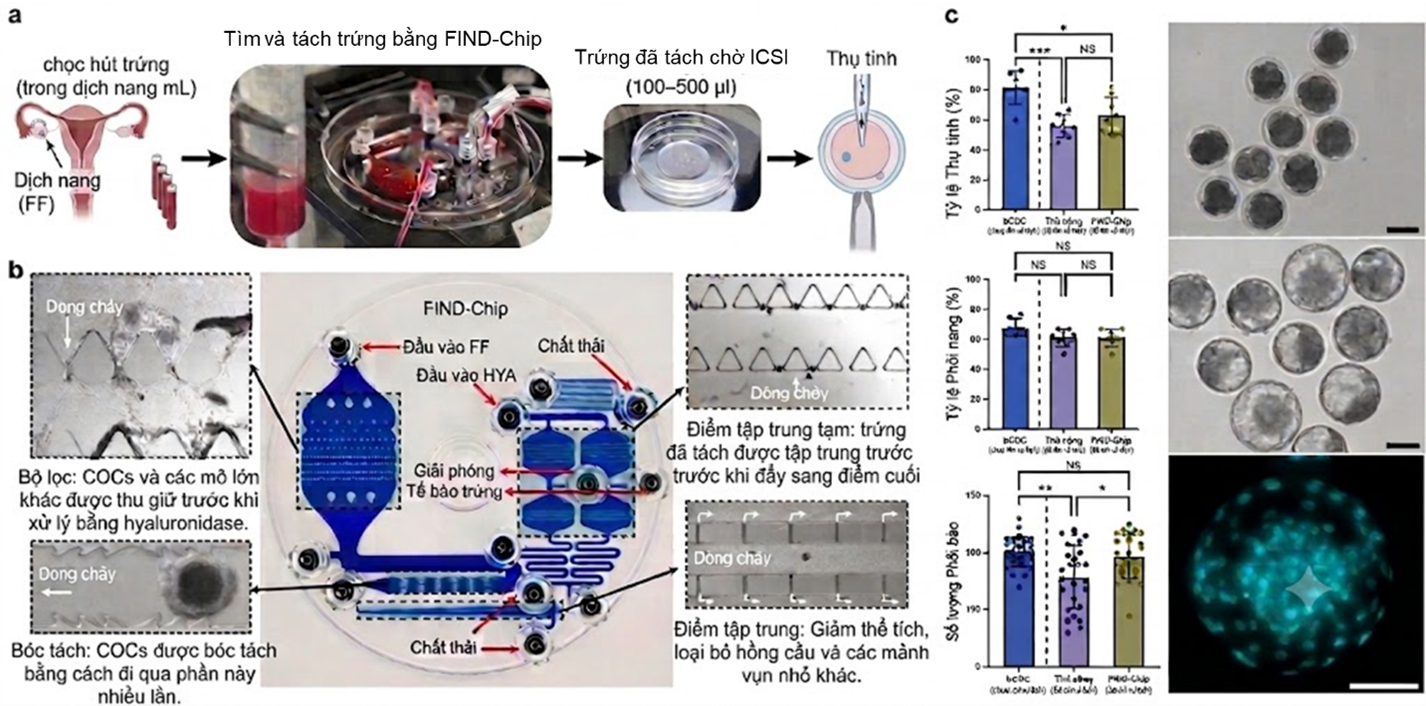
Khác với robot tìm noãn Pearl 2 tập trung vào việc tự động hóa các thao tác tìm noãn sau khi nhờ thị giác AI phát hiện COC, thiết bị vi dòng chảy FIND-Chip (Microfluidic Isolation and Denudation Chip) đại diện cho một hướng tiếp cận hoàn toàn khác, đó là tìm và tách noãn dựa trên các đặc tính vật lý mà không cần thị giác (Mutlu và cs., 2026). FIND-Chip được thiết kế để xử lý những thách thức về thể tích dịch nang lớn và tính phức tạp của các mảnh vụn mô (Mutlu và cs., 2026).
Hệ thống FIND-Chip vận hành thông qua một quy trình khép kín, tích hợp bốn mô-đun vi dòng chảy chuyên biệt để thực hiện các nhiệm vụ tuần tự: lọc dịch nang để tìm noãn, tách noãn, tập trung và thu nhận noãn (Mutlu và cs., 2026). Đầu tiên, mô-đun lọc sử dụng các cột trụ với kích thước khe hở giảm dần từ 3 mm xuống 169 µm để giữ lại các khối COC và mô lớn (Mutlu và cs., 2026). Sau khi nạp mẫu, hệ thống tự động bơm dung dịch hyaluronidase (HYA) để làm mềm khối tế bào hạt, sau đó chuyển sang mô đun tách noãn (Mutlu và cs., 2026) (Hình 2). Tại đây, noãn được di chuyển qua lại trong các kênh vi dòng chảy có các gờ nổi hình đa giác. Dựa trên các chu kỳ dòng chảy dao này tạo ra lực cơ học nhẹ nhàng và đồng nhất để tách các lớp tế bào hạt một cách hiệu quả (Mutlu và cs., 2026) (Hình 2). Weng và cs. (2018) đã tiên phong sử dụng thiết bị vi lưu để tách noãn, đây là tiền thân kỹ thuật cho sự phát triển của thiết bị FIND-Chip hiện đại.
Song song với quá trình tách, mô đun tập trung thực hiện loại bỏ khoảng 85% thể tích dịch nang ban đầu thông qua các kênh phụ, đồng thời sử dụng nguyên lý tập trung quán tính để đẩy các tế bào đích vào dòng chảy chính (Mutlu và cs., 2026). Cuối cùng, các tế bào noãn đã được làm sạch sẽ được giữ lại tại mô đun thu nhận theo cơ chế loại trừ kích thước, trong khi các tế bào máu và mảnh vụn nhỏ hơn sẽ đi vào kênh thải (Mutlu và cs., 2026). Toàn bộ quy trình diễn ra trong khoảng 25 đến 30 phút và có khả năng xử lý thể tích dịch nang lên đến 200 ml (Mutlu và cs., 2026).
Một ưu điểm quan trọng của FIND-Chip là khả năng giảm thiểu stress cơ học cho noãn. Khác với kỹ thuật hút bằng pipette thủ công vốn tạo ra áp suất không ổn định tùy thuộc vào người thực hiện, FIND-Chip duy trì một áp lực dòng chảy hằng định thông qua bộ điều khiển tự động (Mutlu và cs., 2026). Dữ liệu nghiên cứu trên mô hình noãn bò cho thấy, phôi phát triển từ noãn được xử lý bằng FIND-Chip có số lượng phôi bào đồng nhất hơn so với nhóm tách bằng tay, cho thấy chất lượng phôi nang tốt hơn và ít bị biến thiên do tác động cơ học (Mutlu và cs., 2026). Điều này khẳng định rằng tự động hóa bằng công nghệ vi dòng chảy không chỉ cải thiện hiệu suất mà còn đảm bảo tính an toàn sinh học cao cho giao tử (Mutlu và cs., 2026) (Hình 2).
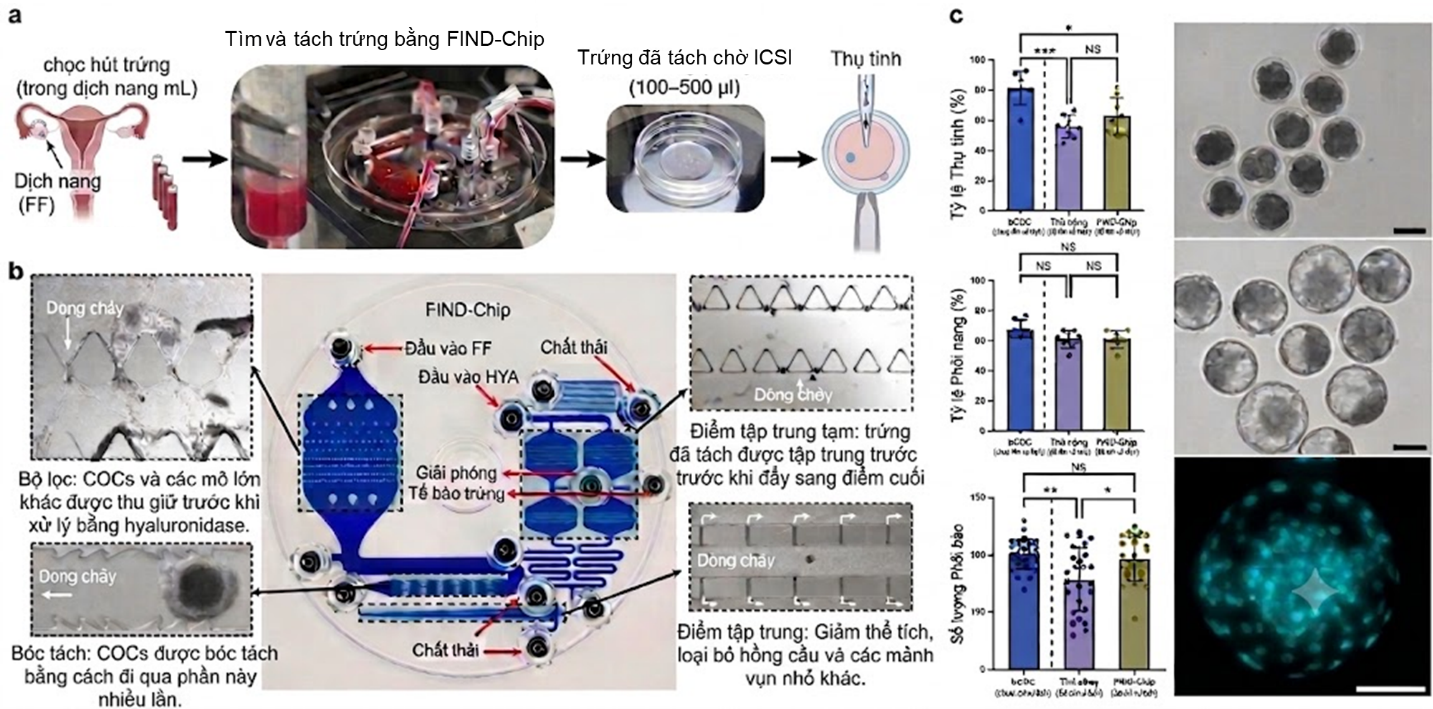
Hình 2. Tổng quan về hệ thống tìm, tách noãn và kết quả phôi học của FIND-Chip. (A) Quy trình sơ bộ FIND-Chip tự động tìm noãn trong dịch nang và tách noãn sẵn sàng chờ ICSI hoặc trữ đông. (B) FIND-Chip cấu tạo gồm 4 mô đun: bộ lọc (giữ lại các COC và mô lớn), bộ tách (tách tế bào hạt bằng chu kỳ dòng chảy), bộ cô đặc (giảm thể tích, loại bỏ hồng cầu/mảnh vụn) và bộ bẫy (giữ cố định tế bào noãn trước khi giải phóng). (C) Biểu đồ so sánh tỷ lệ thụ tinh (trên), tỷ lệ phát triển thành phôi nang (giữa) và số lượng phôi bào (dưới) giữa phương pháp dùng FIND-Chip và các phương pháp thủ công, đối chứng (Mutlu và cs., 2026).
Một trong những khả năng ngoài mong đợi của công nghệ tự động hóa ở bước tìm noãn là việc xác nhận sự tồn tại của một số lượng đáng kể noãn bị bỏ sót sau khi đã tìm thủ công.
Trong một nghiên cứu quy mô lớn thực hiện trên 582 bệnh nhân tại bốn trung tâm IVF khác nhau, hệ thống FIND-Chip đã được sử dụng để quét lại toàn bộ lượng dịch nang đã được các chuyên viên phôi học tìm noãn trước đó. Kết quả cho thấy thiết bị tự động đã thu hồi thêm tổng cộng 583 tế bào noãn. Đáng lưu ý là trong 54,3% trường hợp, có ít nhất một tế bào noãn tiềm năng đã bị bỏ sót sau khi tìm thủ công. Tỷ lệ này cho thấy duy trì ổn định bất kể sự khác biệt về kinh nghiệm của 61 chuyên viên phôi học và 39 bác sĩ tham gia vào quá trình chọc hút và tìm noãn.
Việc thu hồi thêm noãn mang lại ý nghĩa lâm sàng đặc biệt quan trọng đối với từng nhóm bệnh nhân cụ thể. Theo phân loại dựa trên số lượng noãn thu được từ quy trình thủ công, nhóm bệnh nhân có dự trữ buồng trứng kém (chỉ tìm thấy 0–5 noãn thủ công) vẫn có tới 35% trường hợp tìm thêm được noãn bằng máy. Ở nhóm bệnh nhân có số lượng noãn trung bình (6–11 noãn), tỷ lệ tìm thêm được ít nhất một noãn lên tới 51,5%. Tính chung trong một nghiên cứu thử nghiệm, việc sử dụng FIND-Chip đã giúp tìm thêm noãn cho bệnh nhân trung bình 10,2%.
Đánh giá về chất lượng sinh học, các tế bào noãn tìm được thêm không phải là những tế bào kém chất lượng hay thoái hóa. Thống kê về độ trưởng thành cho thấy 41,2% số noãn tìm thêm được là MII, 9,1% noãn MI và 36,3% GV. Việc phát hiện ra những tế bào noãn trưởng thành bị bỏ sót trong dịch nang đã tìm cho thấy quy trình thủ công hiện tại dù được thực hiện bởi các chuyên viên giàu kinh nghiệm vẫn đang vô tình lãng phí những cơ hội mang thai quý giá của bệnh nhân.
Phân tích thêm cho thấy, sót noãn sau tìm thủ công không phụ thuộc vào các yếu tố vận hành như việc sử dụng kháng đông heparin hay thời gian dành cho mỗi ca chọc hút. Điều này cho thấy ưu thế của tự động hóa không chỉ nằm ở tốc độ, mà còn ở khả năng hoạt động ổn định và không phụ thuộc vào các đặc điểm hình thái của khối tế bào hạt vốn có thể gây nhầm lẫn cho thị giác con người.
Tính khả thi của bất kỳ công nghệ tự động hóa nào trong HTSS đều phải được thẩm định dựa trên các chỉ số hiệu quả KPI: tỷ lệ sống sót của noãn, tỷ lệ thụ tinh và tỷ lệ phôi nang sử dụng được (Chavez-Badiola và cs., 2020).
Ở robot Pearl 2, tỷ lệ thụ tinh đạt được là 64,3% và tỷ lệ phôi nang sử dụng được trên mỗi hợp tử đạt 42,2% (Chavez-Badiola và cs., 2026). Những kết quả này đáp ứng các ngưỡng thiết lập theo đồng thuận KPI Vienna cho các labo IVF (Chavez-Badiola và cs., 2026). Quan trọng hơn, tìm noãn bằng Pearl 2 đã dẫn đến sự ra đời của 5 em bé khỏe mạnh từ 9 trường hợp mang thai (Chavez-Badiola và cs., 2026). Costa-Borges và cs. (2023) đã có báo cáo quan trọng về những em bé đầu tiên trên thế giới được sinh ra từ ICSI tự động, đặt nền móng cho các thử nghiệm lâm sàng tiếp theo của chuỗi hệ thống Pearl. Các kết quả nghiên cứu cho thấy tác động vật lý từ cánh tay robot và áp suất hút pipette được kiểm soát bởi AI của Pearl 2 không gây ra những tổn thương tiềm tàng cho sự phát triển lâu dài của phôi (Chavez-Badiola và cs., 2026).
Ở thiết bị FIND-Chip, tỷ lệ thụ tinh đạt 66,7%, so với 70,3% ở noãn tìm bằng phương pháp thủ công (Mutlu và cs., 2026). Đặc biệt, tỷ lệ phôi nang ở nhóm FIND-Chip là 63%, cao hơn mức 49% của nhóm đối chứng thủ công (Mutlu và cs., 2026). Về chất lượng hình thái cho thấy 80% phôi nang từ nhóm tự động hóa đủ tiêu chuẩn để đông lạnh cho thấy sự đồng nhất và chất lượng ổn định (Mutlu và cs., 2026). Một em bé khỏe mạnh chào đời từ chính tế bào noãn trưởng thành được FIND-Chip tìm thấy sau khi đã tìm thủ công đã được báo cáo (Mutlu và cs., 2026). Trường hợp này minh chứng cho giá trị lâm sàng mà tự động hóa mang lại (Mutlu và cs., 2026).
Tự động hóa quy trình tìm noãn ngày D0 mang lại đầy hứa hẹn giá trị cho mô hình quản lý phòng thí nghiệm IVF (Chavez-Badiola và cs., 2026, Mutlu và cs., 2026). Với các thiết bị nhỏ gọn, khép kín và dễ vận hành như FIND-Chip, quy trình chọc hút và tìm noãn, tách noãn có thể được thực hiện tinh gọn mà không cần quá nhiều chuyên viên phôi học trình độ cao túc trực (Mutlu và cs., 2026).
Tuy nhiên, việc triển khai tự động tìm noãn rộng rãi vẫn đối mặt với một số thách thức. Chi phí đầu tư ban đầu cho hệ thống robot và AI là rất lớn, đồng thời đòi hỏi nhân sự phải được đào tạo kỹ năng mới để giám sát và xử lý các sự cố kỹ thuật số (Chavez-Badiola và cs., 2026). Các hệ thống hiện tại như Pearl hay FIND-Chip đang tiếp tục được tích hợp vào nền tảng HTSS tự động hoàn chỉnh (Automated Reproductive Assistant - AURA) để hướng tới một quy trình khép kín hoàn toàn từ giao tử đến phôi nang (Chavez-Badiola và cs., 2026).
Tóm lại, tự động hóa quy trình tìm noãn đang mở ra kỷ nguyên của IVF kỹ thuật số. Hoạt động chính xác của máy móc kết hợp với sự giám sát chuyên môn của con người có thể hứa hẹn mang lại cơ hội thành công cao nhất cho bệnh nhân (Chavez-Badiola và cs., 2026, Mutlu và cs., 2026).
- Chavez-Badiola A, Mendizabal-Ruiz G, Flores-Saiffe Farías A, và cs., Automated oocyte retrieval, denudation, sperm preparation, and ICSI in the IVF laboratory: a proof-of-concept study and report of the first live births. Hum Repro. 2026;41(2), 214-230.
- Mutlu BR, Civale SC, Diettrich J, và cs., Microfluidic automation improves oocyte recovery from follicular fluid of patients undergoing in vitro fertilization. Nat Med. 2026; doi:10.1038/s41591-026-04207-x.
- Chavez-Badiola A, Flores-Saiffe-Farías A, Mendizabal-Ruiz G, và cs., Embryo Ranking Intelligent Classification Algorithm (ERICA): artificial intelligence clinical assistant predicting embryo ploidy and implantation. Reprod Biomed Online. 2020;41(4), 585-593.
- Costa-Borges N, Munné S, Albó E, và cs., First babies conceived with Automated Intracytoplasmic Sperm Injection. Reprod Biomed Online. 2023;47(1), 103237.
- Weng L, và cs., On-chip oocyte denudation from cumulus–oocyte complexes for assisted reproductive therapy. Lab Chip. 2018;18(25), 3892-3902.